Dig Deeper.
Think Smarter.
Survive the Chaos.
The Reznov-Jackal™ — a GPS-free, emission-free solution to autonomously protect logistical groups from RF-based threats.
Decision Drivers for Choosing a MIMO System
Decision Drivers of Multi-Input Mutli-Output (MIMO) Systems







The WDARMS-Class Reznov-Jackal: a Convolution of Precision & Lethality
Excavate Beneath the Battlefield: Using Autonomous Tunneling Robots to Evade Enemy Drones with WDARMS — the WDARMS Reznov-Jackal™
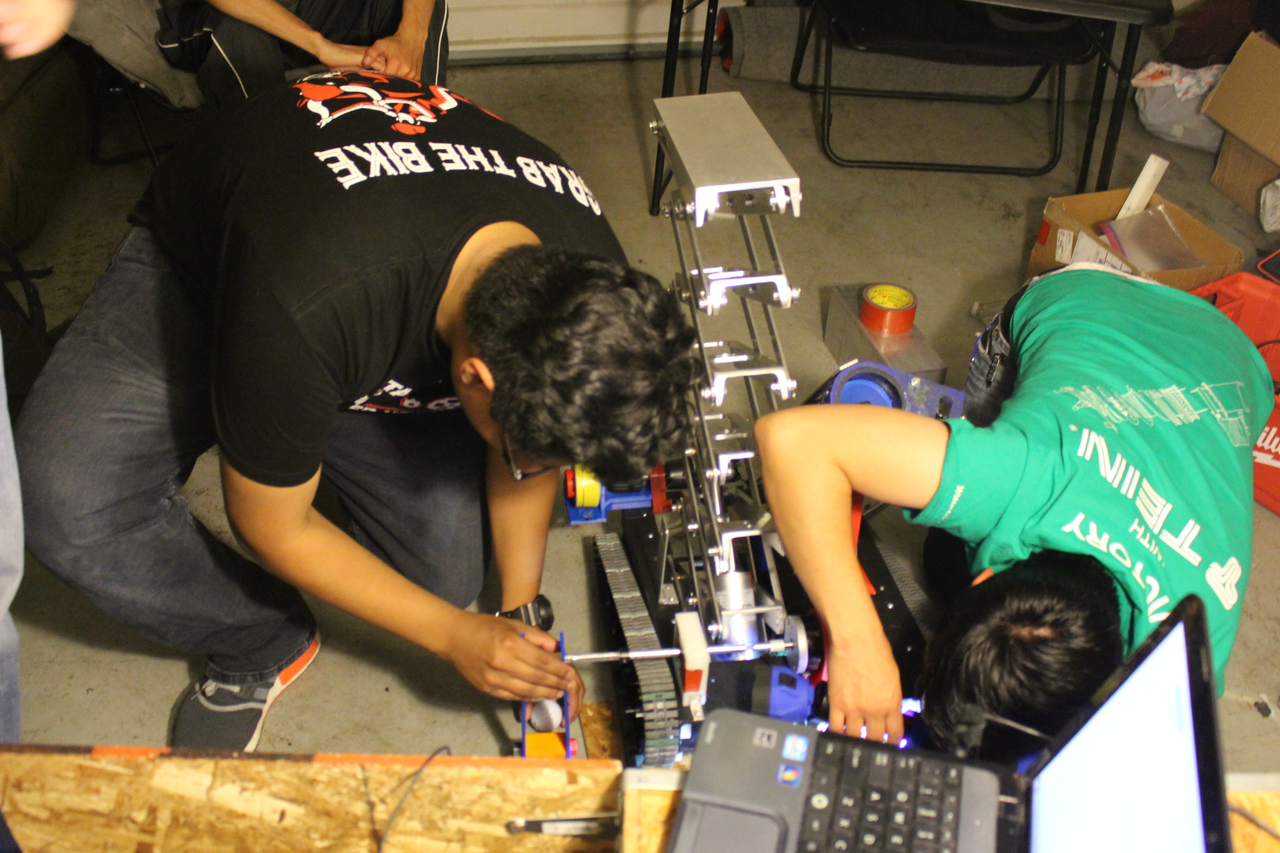
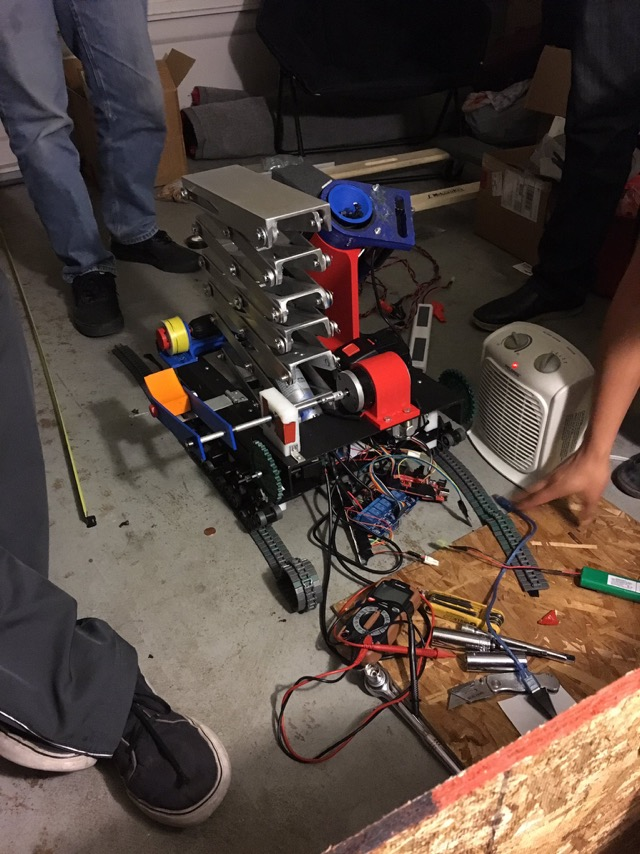
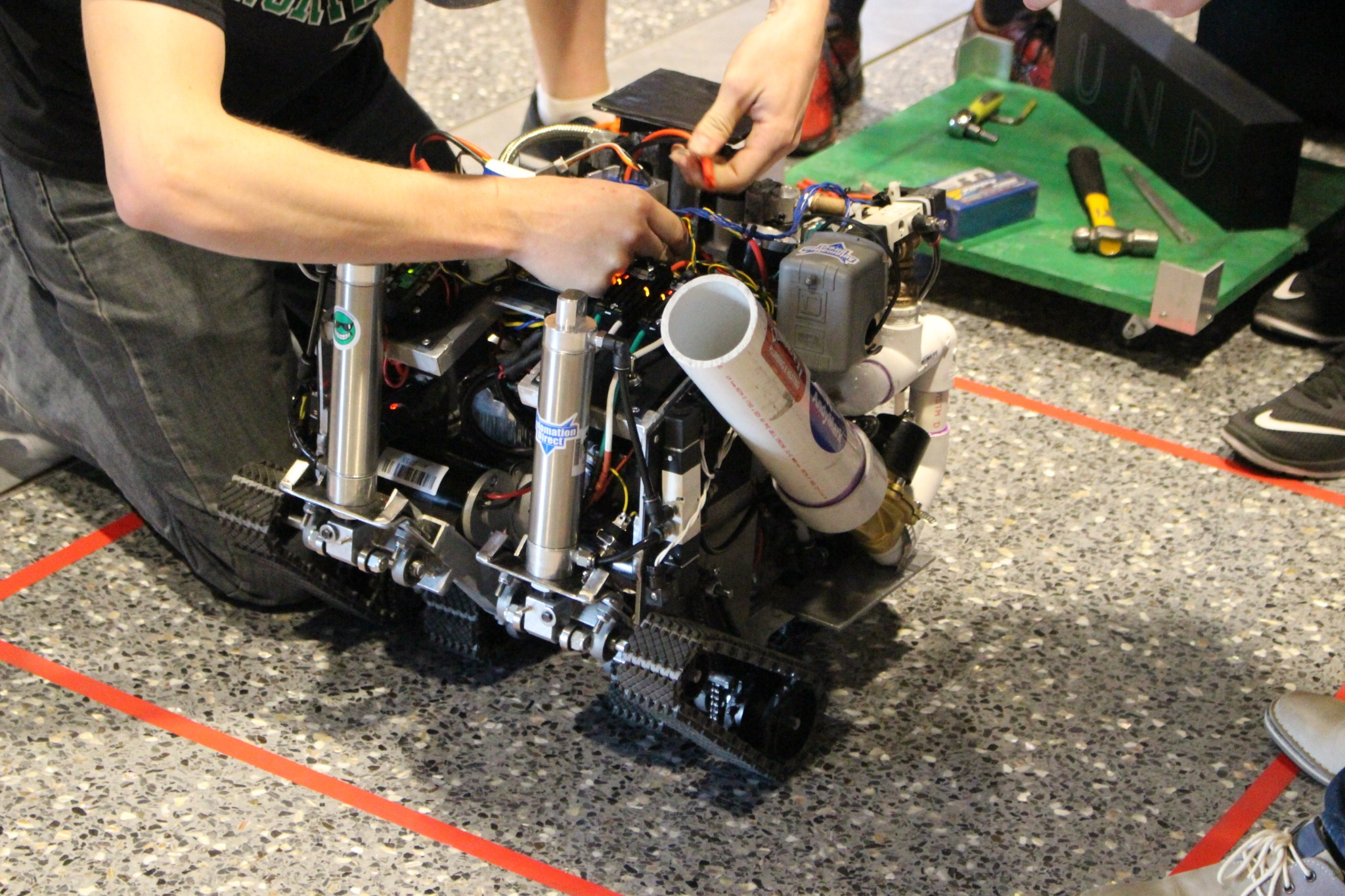
Engineered for swarm communication and EW operations, the WDARMS system boasts a robust chassis, a modular payload bay, and a high-bandwidth radio suite. These features make it suitable for subterranean adaptation. The robot can burrow through soil and debris by integrating a front-mounted auger or rotary cutter. An onboard conveyor moves excavated material while rear-deployed foam sprayers or shoring rods reinforce the tunnel. The compact design allows it to navigate tight urban subsurfaces—ideal for collapsed buildings, bunkers, or enemy tunnel networks; this system rides on reinforced treads with a low-profile chassis, designed for maneuverability in tight, irregular subterranean environments. Unlike wheeled robots, this configuration provides superior traction through rubble, narrow pipes, and collapsed infrastructure, making it perfect for disaster zones, tunnel systems , and bunkers; the visible dual-fan thermal management system and enclosed circuitry indicate MIL-SPEC-grade environmental hardening. This means the robot can operate continuously in dusty, humid, and high-temperature underground environments without thermal failure—a critical asset for long-duration extraction tasks — soft robotic actuators, grippers, and tunnel support structures can be printed on-site and installed quickly. This enables mission-specific customization: e.g., printing a soft-extraction arm for a narrow debris channel or modular soft shoring braces.
What is the Objective of WDARMS?
To deploy this countermeasure system on active logistics platforms and unmanned systems, providing silent, autonomous threat neutralization in RF-contested zones. Our goal is full mission integrated, platform alignment, and acquisition support.
What Makes the WDARMS System Different?
It does not jam. It does not emit. It does not need comms or GPS. Instead, the WDARMS system uses environmental airflow to arm, and enemy signals to target. It is completely passive unit it activates — enabling unmatched stealth and survivability.
Where is the WDARMS System Applicable?
Unmanned systems (UAS / UUV), perimeter defense, shipboard ISR denial, and expeditionary launch platforms. It is modular, small form-factor, and adaptable to multiple deployment scenarios.
What is the Current State of Robustness for the WDARMS System?
EiganUSA™ has validated the functional elements: wind calibration, RF-target discrimination, lithiunm ignition, and projectile containment. EiganUSA™ is now preparing for system-level integration and operational field evaluation.
How Scalable is the WDARMS Solution?
The WDARMS system used 3D-printed, tensor-encoded structures that scale by geometry — not complexity. The digital driver files are adaptable for various platform sizes, and can be field-fabricated if needed using containerized additive systems.
Meet the President of EiganUSA

Alexander Paul Eul is the President of EiganUSA and a driving force in bridging the worlds of biomedical innovation, drone technology, and AI-based additive manufacturing
He is the named inventor of U.S. Patent No. 12105501, a system for generating three-dimensional models using advanced tensor encoding and volumetric data
In addition to hardware innovation, Alexander is the creator of the open-source Node.js tool mariinsky — a powerful library that allows drone pilots
Alexander’s career also includes serving in the U.S. Navy's Naval Sea Systems Command (NAVSEA)
At present, he is also the Director of Monetization at Pluripotent Analytics, a company focused on scalable innovation
Credentials & Expertise
-
📜 Patent Holder:
U.S. Patent No. 12105501 -
🖥️ Software Developer:
Author ofmariinsky -
🎯 Certifications:
CRISPR/Cas9 Additive Manufacturing Deep Neural Networks -
🗣️ Languages:
English (Native) Hebrew (Professional) -
🎓 Education:
California State University (Mathematics)
UCSD Extended Studies (Infrared Systems)
CSU Northridge – CSUN (Computer Engineering)